GPS related functions. More...
#include "cleon_conf.h"#include "app_define.h"#include "sys_define.h"#include "hal_define.h"#include "fs_define.h"
Include dependency graph for sys_gps.c:

Go to the source code of this file.
Functions | |
| void | SYS_GPS_Init (void) |
| Initializing GPS. | |
| void | SYS_GPS_InitDataIO (void) |
| Initializing GPS data pins. | |
| void | SYS_GPS_InitControlIO (void) |
| Initializing GPS control pins. | |
| void | SYS_GPS_InitProgramIO (void) |
| Initializing GPS control pins. | |
| void | SYS_GPS_StartOperation (void) |
| Starting GPS operation. | |
| void | SYS_GPS_StopOperation (void) |
| Starting GPS operation. | |
| bool | SYS_GPS_TestGPS (unsigned int uiDelay) |
| Test if GPS is initalized properly. | |
Variables | |
| cleon_header_u | uniCLEONHeader |
| cleon_gps_data_u | uniCLEONGPSData |
| cleon_sensor_data_u | uniCLEONSensorData |
| bool | bFLAG_DMATransferCompleted |
Detailed Description
GPS related functions.
Definition in file sys_gps.c.
Function Documentation
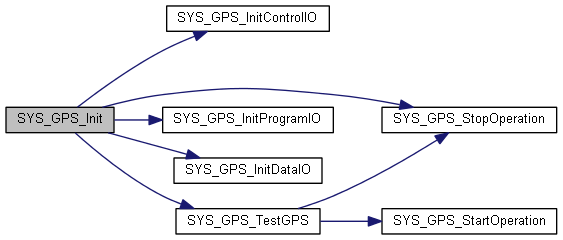
| void SYS_GPS_Init | ( | void | ) |
Initializing GPS.
- Returns
- void
- Parameters
-
void
Definition at line 29 of file sys_gps.c.
{
// Initializing GPS control pins
// Stop GPS operation before initialization
// Program the GPS with pre-configured mode
// Initializing GPS data pins
#if GPS_TEST_ON_INITIALIZATION == _ENABLE_
// Check if GPS is functional by sampling a chunk of GPS signal and take a look inside
// If fail, allow more time to settle (100ms, 200ms, 300ms ...)
// Return if it passes GPS test
return;
}
}
// If it fails the test, turn LED on
#endif
}
Here is the call graph for this function:
Here is the caller graph for this function:

| void SYS_GPS_InitControlIO | ( | void | ) |

| void SYS_GPS_InitDataIO | ( | void | ) |

| void SYS_GPS_InitProgramIO | ( | void | ) |
Initializing GPS control pins.
- Returns
- void
- Parameters
-
void
Definition at line 168 of file sys_gps.c.
{
// CLEON uses default device state 2 (PGM:1, CS:0, SCLK:0, SDATA:1)
// - IF: 4092000 Hz
// - Sampling rate: 16368 samples/sec
// - CMOS level I0 and I1
// PGM pin is set to high
// CS pin is set to low
// SCLK pin is set to low
// SDATA pin is set to high
}
Here is the caller graph for this function:

| void SYS_GPS_StartOperation | ( | void | ) |

| void SYS_GPS_StopOperation | ( | void | ) |

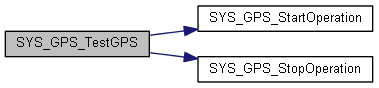
| bool SYS_GPS_TestGPS | ( | unsigned int | uiDelay | ) |
Test if GPS is initalized properly.
- Returns
- void
- Parameters
-
uiDelay - time for GPS to settle down (in milliseconds)
Definition at line 228 of file sys_gps.c.
{
unsigned int uiTestCountFor0xFF = 0;
unsigned int uiTestCountFor0x00 = 0;
// Start GPS operation
// Allow GPS time to settle
SYS_GPS_TimingDealy(uiDelay);
// Start DMA transfer
DMA0CTL |= DMAEN;
// Wait until DMA transfer completed
while((DMA0CTL & DMAIFG) != DMAIFG);
DMA0CTL &= ~DMAIFG;
// Count the number of '0xFF' and '0x00'
uiTestCountFor0xFF++;
uiTestCountFor0x00++;
}
}
// Stop GPS operation
// If number of '0xFF' or '0x00' exceeds half or total sampled signal, regards GPS chip is not functional
// (number of '0xFF' or '0x00' cannot exceed half of captured GPS signal due to signal's physical nature)
if((uiTestCountFor0xFF > (SIZE_OF_GPS_DATA_CHUNK_IN_BYTE/2))||(uiTestCountFor0x00 > (SIZE_OF_GPS_DATA_CHUNK_IN_BYTE/2))){
return _FAIL_;
}else{
return _SUCCESS_;
}
}
Here is the call graph for this function:
Here is the caller graph for this function:

Variable Documentation
| cleon_gps_data_u uniCLEONGPSData |
Definition at line 14 of file sys_init.c.
| cleon_header_u uniCLEONHeader |
Definition at line 13 of file sys_init.c.
| cleon_sensor_data_u uniCLEONSensorData |
Definition at line 15 of file sys_init.c.
